
作者:石塔西 爱好机器学习算法,以及军事和历史
知乎ID:https://www.zhihu.com/people/si-ta-xi
前言
之前通过线上课程学习David Silver的《强化学习》,留下深刻印象的是其中一堆堆的公式。公式虽然严谨,但是对于我来说,遇到实际问题时,我需要在脑海中浮现出一幅图或一条曲线,帮我快速定位问题。正所谓“一图胜千言”嘛。
最近终于找到了这样一幅图。国外有大神用漫画的形式讲解了强化学习中经典的Advantage-Actor-Critic(A2C)算法。尽管标题中只提及了A2C,实际上是将整个RL的算法思想凝结在区区几幅漫画中。
我很佩服漫画的作者,能够从复杂的公式中提炼出算法的精髓,然后用通俗易懂、深入浅出的方式展示出来。能够将厚书读薄,才能显现出一个人的功力。
有这样NB的神作,不敢独吞,调节一下顺序,补充一些背景知识,加上我自己的批注,分享出来,以飨读者。 原漫画的地址见:Intuitive RL: Intro to Advantage-Actor-Critic (A2C)(点击阅读原文,科学上网查看原文),英语好的同学可以科学上网看原版的。
基本概念
强化学习中最基础的四个概念:Agent, State, Action, Reward

Agent:不用多说,就是你的程序,在这里就是这只狐狸。
Action: agent需要做的动作。在漫画中,就是狐狸在岔路口时,需要决定走其中的哪一条路。
State: 就是agent在决策时所能够掌握的所有信息。对于这只狐狸来说,既包括了决策当时的所见所闻,也包括了它一路走来的记忆。
Reward:选择不同的路,可能遇到鸟蛋(正向收益),也有可能遇到豺狼(负向收益)。
为什么Actor? 为什么Critic?
正如我之前所说的,Actor-Critic是一个混合算法,结合了Policy Gradient(Actor)与Value Function Approximation (Critic)两大类算法的优点。原漫画没有交待,一个agent为什么需要actor与critic两种决策机制。所以,在让狐狸继续探险之前,有必要先简单介绍一下Policy Gradient (策略梯度,简称PG)算法,后面的内容才好理解。
Policy Gradient看起来很高大上,但是如果类比有监督学习中的多分类算法,就很好理解了。两类算法的类比(简化版本)如下表所示,可见两者很相似
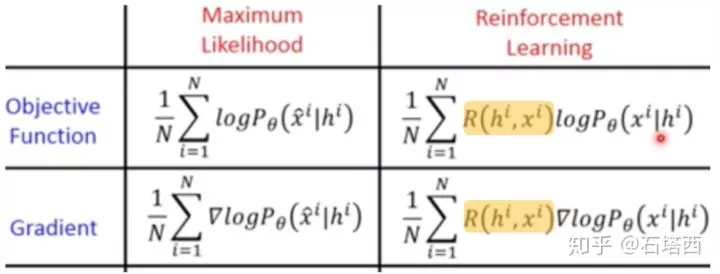 “分类有监督学习”与“策略梯度强化学习”的对比
“分类有监督学习”与“策略梯度强化学习”的对比
还是以狐狸在三岔路口的选择为例
怎么理解Likelihood Ratio这个乘子?这个乘子必须满足什么样的要求?最简单的形式,  可以是一次实验(如AlphaGo的一次对弈,狐狸一天的探险)下来的总收益。从而PG可以写成如下形式:
可以是一次实验(如AlphaGo的一次对弈,狐狸一天的探险)下来的总收益。从而PG可以写成如下形式:
 Policy Gradient公式
Policy Gradient公式
以上公式表明:
但是,以上算法中统一用 做乘子,还是太简单粗暴,有些“一荣倶荣,一损俱损”搞“连坐”的味道。因此,在实际算法中,围绕着policy gradient前的那个乘子,衍生出多种变体,
做乘子,还是太简单粗暴,有些“一荣倶荣,一损俱损”搞“连坐”的味道。因此,在实际算法中,围绕着policy gradient前的那个乘子,衍生出多种变体,
因为篇幅所限,简单介绍一下V(s)与Q(s,a)。它们是Value Function Approximation算法中两个重要概念,著名的Deep Q-Network中的Q就来源于Q(s,a)。V(s)表示从状态s走下去能够得到的平均收益。它类似于咱们常说的“势”,如果一个人处于“优势”,无论他接下去怎么走(无论接下去执行怎样的action),哪怕走一两个昏招,也有可能获胜。具体精确的理解,还请感兴趣的同学移步David Silver的课吧。
重新回顾一下算法的脉络,所谓Actor-Critic算法
Actor负责学习在给定state下给各候选action打分。在action空间离散的情况下,就类似于多分类学习。
因为与多分类监督学习不同,每步决策时,不存在唯一正确的action,所以PG前面应该乘以一个系数,即likelihood ratio。如果用V(S),即state-value,来表示PG前的乘子,并用一个模型来专门学习它,则这个拟合V(s)的模型就叫做Critic,类似一个回归模型 。
如果用Critic预测值与真实值之间的误差,作为likelihood ratio,则PG前的乘子就有一个专门的名称,Advantage。这时的算法,就叫做Advantage-Actor-Critic,即A2C。
如果在学习过程中,引入异步、分布式学习,此时的算法叫做Asynchronous-Advantage-Actor-Critic,即著名的A3C。
狐狸的探险
上一节已经说明了狐狸(Agent)为什么需要actor-critic两个决策系统。则狐狸的决策系统可以由下图表示

state是狐狸做决策时所拥有的一切信息,包括它的所见所闻,还有它的记忆。
critic负责学习到准确的V(s),负责评估当前状态的“态势”,类似一个回归任务。
actor负责学习某状态下各候选action的概率,类似一个多分类任务。

在第一个路口
狐狸的critic觉得当前态势不错,预计从此走下去,今天能得20分,即V(s)=20
狐狸的actor给三条路A/B/C都打了分
狐狸按照A=0.8, B=C=0.1的概率掷了色子,从而决定走道路A(没有简单地选择概率最大的道路,是为了有更多机会explore)
沿A路走,采到一枚蘑菇,得1分
把自己对state value的估计值,采取的动作,得到的收益都记录下来
在接下来的两个路口,也重复以上过程:

狐狸的反思:更新Critic
毕竟这只狐狸还太年轻,critic对当前状态的估计可能存在误差,actor对岔道的打分也未必准确,因此当有了三次经历后,狐狸停下来做一次反思,更新一下自己的critic和actor。狐狸决定先更新自己的critic。
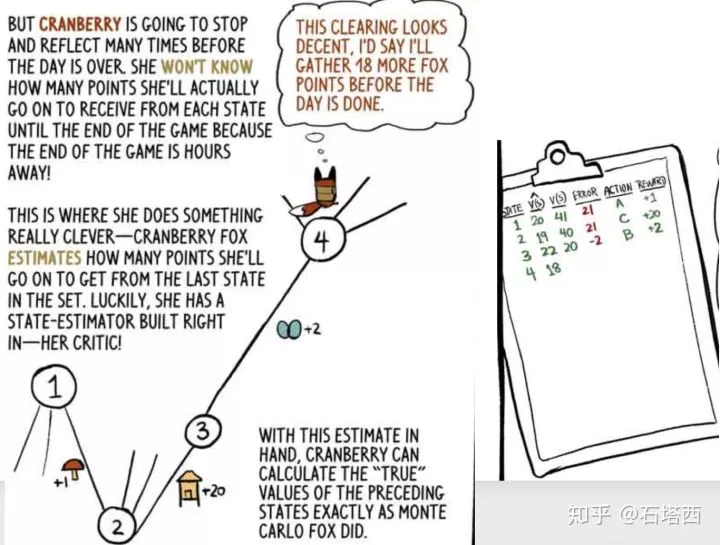
之前说过了,critic更像是一个“回归”任务,目标是使critic预测出的state value与真实state value越接近越好。以上三次经历的state value的预测值,狐狸已经记在自己的小本上了,那么问题来了,那三个state的真实state value是多少?
在如何获取真实state value的问题上,又分成了两个流派:Monte Carlo(MC)法与Temporal-Difference(TD)法。
MC法,简单来说,就是将一次实验进行到底,实验结束时的V(s)自然为0,然后根据Bellman方程回推实验中每个中间步骤的V(s),如下图所示(图中简化了Bellman方程,忽略了时间衰减)。MC法的缺点,一是更新慢,必须等一次实验结束,才能对critic/actor进行更新;二是因为V(s)是状态s之后能够获得的平均收益,实验越长,在每个步骤之后采取不同action导致的分叉越多,但是MC法仅仅依靠上一次实验所覆盖的单一路径就进行更新,显然导致high variance。
 Monte Carlo法
Monte Carlo法
另一种方法,TD法,就是依靠现有的不准确的critic进行bootstrapping,逐步迭代,获得精确的critic
 Temporal-Difference法
Temporal-Difference法
如上图中狐狸的记事本所示,对于以上三步,狐狸既有了自己对当时state value的预测值,也有了那三个state value的“真实值”,上面的红字就是二者的差,可以用类似“回归”的方法最小化求解。
狐狸的反思:更新Actor
正如前文所述,critic的作用是为了准确预测Policy Gradient前的那个系数,即Likelihood Ratio。
那么critic应该为PG贡献一个什么样的likelihood ratio呢?考虑以下的例子

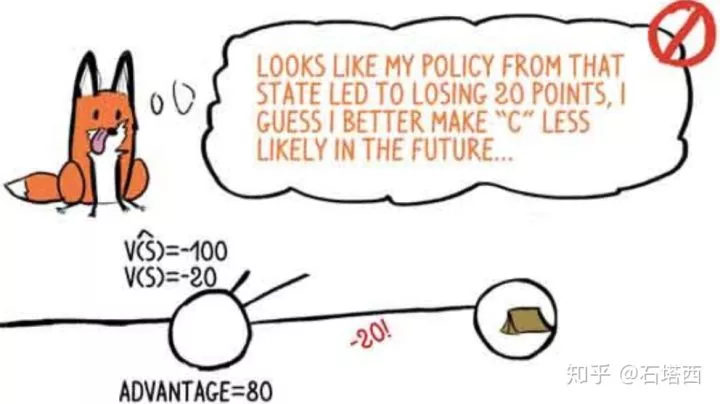
在一个三岔路品,狐狸感受到的状态是前路有狼、陷阱和破桥,哪条道都不好走,因此狐狸预测当前“状态值”极差, =-100
=-100
狐狸还是硬着头皮选择了一条稍微好走的路,中间丢失了许多食物,收益=-20
恰好过了桥之后,一天也就结束了,最终状态的  =0。根据critic bootstrapping进行回推,当初过桥前
=0。根据critic bootstrapping进行回推,当初过桥前 “真实状态值”=-20
“真实状态值”=-20
那么actor中,policy gradient之前的likelihood ratio应该是多少?能不能选择采取动作之后的直接收益,-20? 如果是的话,因为选择过桥,导致狐狸丢了20分,以后狐狸在相同状态下(看见前路有狼、陷阱和破桥)选择“过破桥”的概率应该降低!!!
以上结论显然是不合适的,下次不选桥,难道要选狼与陷阱?!哪里出错了?
换个思路:
当初在岔路口时,狐狸对当时state value的预测是-100,
选择了破桥之后,根据critic bootstrapping推导回去,发现之前在岔路口时的状态还不至于那么差,“真实state value”=-20。
回头来看,选择“破桥”还改善了当时的处境,有80分的提升。
因此,之后在相同状态下(看见前路有狼、陷阱和破桥)选择“破桥”的概率,不仅不应该降低,反而还要提高,以鼓励这种明智的选择,显然更合情合理。
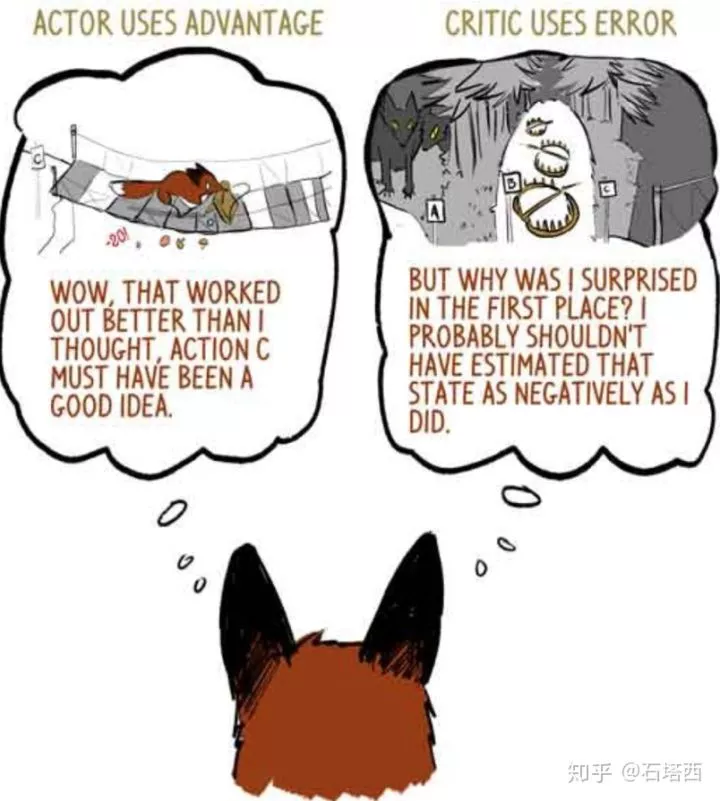
这里,某个状态s下的state value的“真实值”与预测值之间的差异,就叫做Advantage,拿advantage作为Policy Gradient之前的乘子,整个算法就叫做Advantage-Actor-Critic (A2C)。
Advantage
注意state value的“真实值”与预测值之间的差异在Actor与Critic上发挥的不同作用
其他
A2C的主要思路就这样介绍完毕了。在原漫画中,还简单介绍了A3C、Entropy Loss的思想,就属于旁枝末节,请各位看官们移步原漫画。其实A3C的思路也很简单(实现就是另一回事了),无非是让好几只狐狸并发地做实验,期间它们共享经验教训,以加速学习。
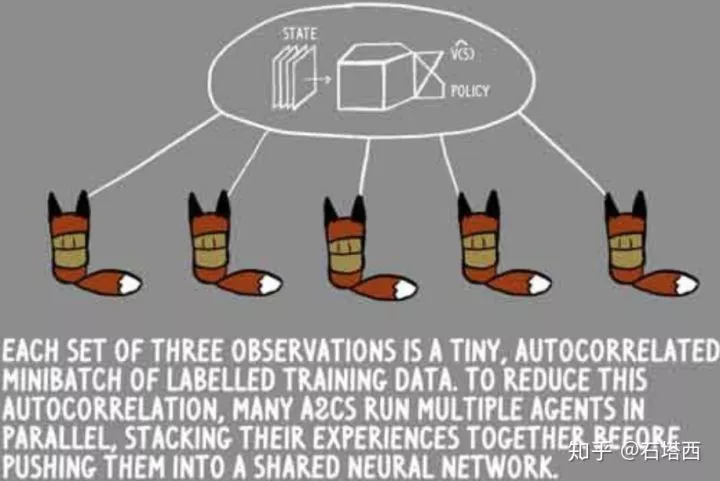 A3C
A3C
小结
本篇算是一个半原创吧,在翻译的同时,也增加了我对Actor-Critic的理解。
对于初学RL的同学,希望本文能够帮你们破除RL的神秘感,理清各算法发展的脉络,以后在David Silver课上看到那些公式时,能够有“似曾相识”的感觉。
对于掌握了RL基本算法的同学,也希望你们能够像我一样,当遇到实际问题时,先想到漫画中的小狐狸,定位问题,再去有的放矢地去翻书找公式。
很佩服原漫画的作者,能将复杂的公式、原理用如此通俗易懂、深入浅出的方式讲明白。再次向原作者致敬,Excellent Job !!!

推荐阅读:
公众号后台回复关键词学习
回复 免费 获取免费课程
回复 直播 获取系列直播课
回复 Python 1小时破冰入门Python
回复 人工智能 从零入门人工智能
回复 深度学习 手把手教你用Python深度学习
回复 机器学习 小白学数据挖掘与机器学习
回复 贝叶斯算法 贝叶斯与新闻分类实战
回复 数据分析师 数据分析师八大能力培养
回复 自然语言处理 自然语言处理之AI深度学习

 就是每次决策前的信息,即特征
就是每次决策前的信息,即特征 ,则我们可以用“多分类算法”来学习它。
,则我们可以用“多分类算法”来学习它。 (未必是最优的),再将这个选择对最终loss或gradient的贡献乘以一个系数,即上式中的
(未必是最优的),再将这个选择对最终loss或gradient的贡献乘以一个系数,即上式中的  ,有个学术的名字叫“Likelihood Ratio”
,有个学术的名字叫“Likelihood Ratio”
 对"优化变量
对"优化变量 "的梯度
"的梯度 代表第n次实验一共经历
代表第n次实验一共经历 次决策
次决策
 的总收益
的总收益
 ,当前模型参数是
,当前模型参数是


 与
与 同向,即,如果我们要增加
同向,即,如果我们要增加 ,就假定第n次实验中的每步决策都是正确的,应该调节
,就假定第n次实验中的每步决策都是正确的,应该调节 使下次给定
使下次给定 能够执行
能够执行 的概率增加。
的概率增加。
 与
与 反向,即,如果我们要增加
反向,即,如果我们要增加 ,就假定第n次实验中的每步决策都是错误的,应该调节
,就假定第n次实验中的每步决策都是错误的,应该调节 使下次给定
使下次给定 能够执行
能够执行 的概率降低。
的概率降低。 =18
=18 =18,而且第3步获得了2分的收益,假如不考虑时间衰减,则
=18,而且第3步获得了2分的收益,假如不考虑时间衰减,则  =18+2=20
=18+2=20 =
= +
+
 =
=  +
+ =
=
 的概率,即抑制当时采取的动作
的概率,即抑制当时采取的动作